1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
428
429
430
431
432
433
434
435
436
437
438
439
440
441
442
443
444
445
446
447
448
449
450
451
452
453
454
455
456
457
458
459
460
461
462
463
464
465
466
467
468
469
470
471
472
473
474
475
476
477
478
479
480
481
482
483
484
485
486
487
488
489
490
491
492
493
494
495
496
497
498
499
500
501
502
503
504
505
506
507
508
509
510
511
512
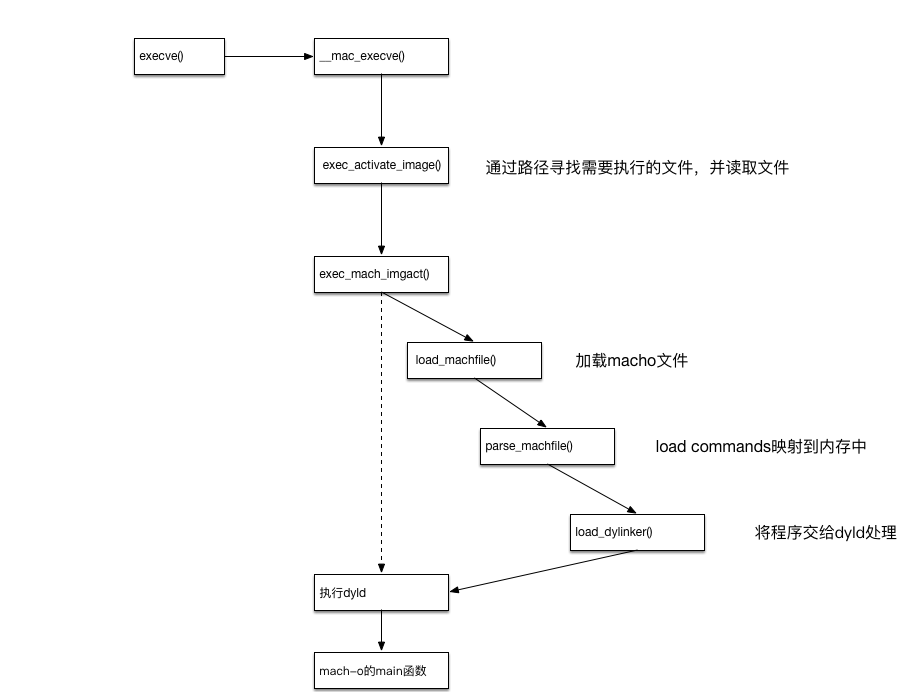
| /*
* exec_mach_imgact
*
* Image activator for mach-o 1.0 binaries.
*
* Parameters; struct image_params * image parameter block
*
* Returns: -1 not a fat binary (keep looking)
* -2 Success: encapsulated binary: reread
* >0 Failure: error number
* EBADARCH Mach-o binary, but with an unrecognized
* architecture
* ENOMEM No memory for child process after -
* can only happen after vfork()
*
* Important: This image activator is NOT byte order neutral.
*
* Note: A return value other than -1 indicates subsequent image
* activators should not be given the opportunity to attempt
* to activate the image.
*
* TODO: More gracefully handle failures after vfork
*/
static int
exec_mach_imgact(struct image_params *imgp)
{
struct mach_header *mach_header = (struct mach_header *)imgp->ip_vdata;
proc_t p = vfs_context_proc(imgp->ip_vfs_context);
int error = 0;
task_t task;
task_t new_task = NULL; /* protected by vfexec */
thread_t thread;
struct uthread *uthread;
vm_map_t old_map = VM_MAP_NULL;
vm_map_t map;
load_return_t lret;
load_result_t load_result;
struct _posix_spawnattr *psa = NULL;
int spawn = (imgp->ip_flags & IMGPF_SPAWN);
int vfexec = (imgp->ip_flags & IMGPF_VFORK_EXEC);
int p_name_len;
/*
* make sure it's a Mach-O 1.0 or Mach-O 2.0 binary; the difference
* is a reserved field on the end, so for the most part, we can
* treat them as if they were identical. Reverse-endian Mach-O
* binaries are recognized but not compatible.
*/
// 检测header里面的magic,是否符合macho文件的特征
// NXSwapInt:PowerPC等平台中的二进制文件
//MH_CIGAM = 0xCEFAEDFE
//MH_CIGAM_64 = 0xCFFAEDFE
if ((mach_header->magic == MH_CIGAM) ||
(mach_header->magic == MH_CIGAM_64)) {
error = EBADARCH;
goto bad;
}
// 检测header里面的magic,是否符合macho文件的特征
// #define MH_MAGIC 0xfeedface
// #define MH_MAGIC_64 0xfeedfacf
// 通用的macho二进制文件,一般遇到都是这种
if ((mach_header->magic != MH_MAGIC) &&
(mach_header->magic != MH_MAGIC_64)) {
error = -1;
goto bad;
}
// 检测macho的文件类型,文件类型必须是可执行文件
// 还有一些其他的常见类型
// #define MH_OBJECT 0x1 编译过程产生的obj文件
// #define MH_CORE 0x4 崩溃时的dump文件
if (mach_header->filetype != MH_EXECUTE) {
error = -1;
goto bad;
}
// 获取macho的执行环境,cpu的平台与版本
if (imgp->ip_origcputype != 0) {
/* Fat header previously had an idea about this thin file */
if (imgp->ip_origcputype != mach_header->cputype ||
imgp->ip_origcpusubtype != mach_header->cpusubtype) {
error = EBADARCH;
goto bad;
}
} else {
imgp->ip_origcputype = mach_header->cputype;
imgp->ip_origcpusubtype = mach_header->cpusubtype;
}
task = current_task();
thread = current_thread();
uthread = get_bsdthread_info(thread);
if ((mach_header->cputype & CPU_ARCH_ABI64) == CPU_ARCH_ABI64)
imgp->ip_flags |= IMGPF_IS_64BIT;
/* If posix_spawn binprefs exist, respect those prefs. */
psa = (struct _posix_spawnattr *) imgp->ip_px_sa;
if (psa != NULL && psa->psa_binprefs[0] != 0) {
int pr = 0;
for (pr = 0; pr < NBINPREFS; pr++) {
cpu_type_t pref = psa->psa_binprefs[pr];
if (pref == 0) {
/* No suitable arch in the pref list */
error = EBADARCH;
goto bad;
}
if (pref == CPU_TYPE_ANY) {
/* Jump to regular grading */
goto grade;
}
if (pref == imgp->ip_origcputype) {
/* We have a match! */
goto grade;
}
}
error = EBADARCH;
goto bad;
}
grade:
//检测cpu平台
if (!grade_binary(imgp->ip_origcputype, imgp->ip_origcpusubtype & ~CPU_SUBTYPE_MASK)) {
error = EBADARCH;
goto bad;
}
/* Copy in arguments/environment from the old process */
//获取环境变量和参数
//为vfork执行macho做准备
error = exec_extract_strings(imgp);
if (error)
goto bad;
error = exec_add_apple_strings(imgp);
if (error)
goto bad;
AUDIT_ARG(argv, imgp->ip_startargv, imgp->ip_argc,
imgp->ip_endargv - imgp->ip_startargv);
AUDIT_ARG(envv, imgp->ip_endargv, imgp->ip_envc,
imgp->ip_endenvv - imgp->ip_endargv);
/*
* We are being called to activate an image subsequent to a vfork()
* operation; in this case, we know that our task, thread, and
* uthread are actually those of our parent, and our proc, which we
* obtained indirectly from the image_params vfs_context_t, is the
* new child process.
*/
// 通过fork,为macho生成一个新的线程
if (vfexec || spawn) {
if (vfexec) {
imgp->ip_new_thread = fork_create_child(task, NULL, p, FALSE, (imgp->ip_flags & IMGPF_IS_64BIT));
if (imgp->ip_new_thread == NULL) {
error = ENOMEM;
goto bad;
}
}
/* reset local idea of thread, uthread, task */
thread = imgp->ip_new_thread;
uthread = get_bsdthread_info(thread);
task = new_task = get_threadtask(thread);
map = get_task_map(task);
} else {
map = VM_MAP_NULL;
}
/*
* We set these flags here; this is OK, since if we fail after
* this point, we have already destroyed the parent process anyway.
*/
// 设置一些dyld需要使用的参数
task_set_dyld_info(task, MACH_VM_MIN_ADDRESS, 0);
if (imgp->ip_flags & IMGPF_IS_64BIT) {
task_set_64bit(task, TRUE);
OSBitOrAtomic(P_LP64, &p->p_flag);
} else {
task_set_64bit(task, FALSE);
OSBitAndAtomic(~((uint32_t)P_LP64), &p->p_flag);
}
/*
* Load the Mach-O file.
*
* NOTE: An error after this point indicates we have potentially
* destroyed or overwritten some process state while attempting an
* execve() following a vfork(), which is an unrecoverable condition.
* We send the new process an immediate SIGKILL to avoid it executing
* any instructions in the mutated address space. For true spawns,
* this is not the case, and "too late" is still not too late to
* return an error code to the parent process.
*/
/*
* Actually load the image file we previously decided to load.
*/
//加载,映射macho文件到内存
lret = load_machfile(imgp, mach_header, thread, map, &load_result);
if (lret != LOAD_SUCCESS) {
error = load_return_to_errno(lret);
goto badtoolate;
}
proc_lock(p);
p->p_cputype = imgp->ip_origcputype;
p->p_cpusubtype = imgp->ip_origcpusubtype;
proc_unlock(p);
vm_map_set_user_wire_limit(get_task_map(task), p->p_rlimit[RLIMIT_MEMLOCK].rlim_cur);
/*
* Set code-signing flags if this binary is signed, or if parent has
* requested them on exec.
*/
//设置了一堆标记位
//需要关心一下的是这里和code-signgin有点关系
if (load_result.csflags & CS_VALID) {
imgp->ip_csflags |= load_result.csflags &
(CS_VALID|
CS_HARD|CS_KILL|CS_RESTRICT|CS_ENFORCEMENT|CS_REQUIRE_LV|CS_DYLD_PLATFORM|
CS_EXEC_SET_HARD|CS_EXEC_SET_KILL|CS_EXEC_SET_ENFORCEMENT);
} else {
imgp->ip_csflags &= ~CS_VALID;
}
if (p->p_csflags & CS_EXEC_SET_HARD)
imgp->ip_csflags |= CS_HARD;
if (p->p_csflags & CS_EXEC_SET_KILL)
imgp->ip_csflags |= CS_KILL;
if (p->p_csflags & CS_EXEC_SET_ENFORCEMENT)
imgp->ip_csflags |= CS_ENFORCEMENT;
if (p->p_csflags & CS_EXEC_SET_INSTALLER)
imgp->ip_csflags |= CS_INSTALLER;
/*
* Set up the system reserved areas in the new address space.
*/
//依据可执行文件的平台,设置合适的执行环境
vm_map_exec(get_task_map(task),
task,
(void *) p->p_fd->fd_rdir,
cpu_type());
/*
* Close file descriptors which specify close-on-exec.
*/
//关闭所有被标记为close-on-exec的文件
fdexec(p, psa != NULL ? psa->psa_flags : 0);
/*
* deal with set[ug]id.
*/
//处理setuid相关的逻辑,和权限相关
error = exec_handle_sugid(imgp);
if (error) {
goto badtoolate;
}
/*
* deal with voucher on exec-calling thread.
*/
if (imgp->ip_new_thread == NULL)
thread_set_mach_voucher(current_thread(), IPC_VOUCHER_NULL);
/* Make sure we won't interrupt ourself signalling a partial process */
if (!vfexec && !spawn && (p->p_lflag & P_LTRACED))
psignal(p, SIGTRAP);
//为进程设置应用层的栈地址
if (load_result.unixproc &&
create_unix_stack(get_task_map(task),
&load_result,
p) != KERN_SUCCESS) {
error = load_return_to_errno(LOAD_NOSPACE);
goto badtoolate;
}
if (vfexec || spawn) {
old_map = vm_map_switch(get_task_map(task));
}
if (load_result.unixproc) {
user_addr_t ap;
/*
* Copy the strings area out into the new process address
* space.
*/
ap = p->user_stack;
error = exec_copyout_strings(imgp, &ap);
if (error) {
if (vfexec || spawn)
vm_map_switch(old_map);
goto badtoolate;
}
/* Set the stack */
thread_setuserstack(thread, ap);
}
if (load_result.dynlinker) {
uint64_t ap;
int new_ptr_size = (imgp->ip_flags & IMGPF_IS_64BIT) ? 8 : 4;
/* Adjust the stack */
ap = thread_adjuserstack(thread, -new_ptr_size);
error = copyoutptr(load_result.mach_header, ap, new_ptr_size);
if (error) {
if (vfexec || spawn)
vm_map_switch(old_map);
goto badtoolate;
}
task_set_dyld_info(task, load_result.all_image_info_addr,
load_result.all_image_info_size);
}
/* Avoid immediate VM faults back into kernel */
//防止立刻执行指令导致的错误,做了大量和dyld相关的事情
exec_prefault_data(p, imgp, &load_result);
if (vfexec || spawn) {
vm_map_switch(old_map);
}
/* Set the entry point */
thread_setentrypoint(thread, load_result.entry_point);
/* Stop profiling */
stopprofclock(p);
/*
* Reset signal state.
*/
execsigs(p, thread);
/*
* need to cancel async IO requests that can be cancelled and wait for those
* already active. MAY BLOCK!
*/
_aio_exec( p );
#if SYSV_SHM
/* FIXME: Till vmspace inherit is fixed: */
if (!vfexec && p->vm_shm)
shmexec(p);
#endif
#if SYSV_SEM
/* Clean up the semaphores */
semexit(p);
#endif
/*
* Remember file name for accounting.
*/
p->p_acflag &= ~AFORK;
/*
* Set p->p_comm and p->p_name to the name passed to exec
*/
p_name_len = sizeof(p->p_name) - 1;
if(imgp->ip_ndp->ni_cnd.cn_namelen > p_name_len)
imgp->ip_ndp->ni_cnd.cn_namelen = p_name_len;
bcopy((caddr_t)imgp->ip_ndp->ni_cnd.cn_nameptr, (caddr_t)p->p_name,
(unsigned)imgp->ip_ndp->ni_cnd.cn_namelen);
p->p_name[imgp->ip_ndp->ni_cnd.cn_namelen] = '\0';
if (imgp->ip_ndp->ni_cnd.cn_namelen > MAXCOMLEN)
imgp->ip_ndp->ni_cnd.cn_namelen = MAXCOMLEN;
bcopy((caddr_t)imgp->ip_ndp->ni_cnd.cn_nameptr, (caddr_t)p->p_comm,
(unsigned)imgp->ip_ndp->ni_cnd.cn_namelen);
p->p_comm[imgp->ip_ndp->ni_cnd.cn_namelen] = '\0';
pal_dbg_set_task_name( p->task );
#if DEVELOPMENT || DEBUG
/*
* Update the pid an proc name for importance base if any
*/
task_importance_update_owner_info(p->task);
#endif
memcpy(&p->p_uuid[0], &load_result.uuid[0], sizeof(p->p_uuid));
// <rdar://6598155> dtrace code cleanup needed
#if CONFIG_DTRACE
/*
* Invalidate any predicate evaluation already cached for this thread by DTrace.
* That's because we've just stored to p_comm and DTrace refers to that when it
* evaluates the "execname" special variable. uid and gid may have changed as well.
*/
dtrace_set_thread_predcache(current_thread(), 0);
/*
* Free any outstanding lazy dof entries. It is imperative we
* always call dtrace_lazy_dofs_destroy, rather than null check
* and call if !NULL. If we NULL test, during lazy dof faulting
* we can race with the faulting code and proceed from here to
* beyond the helpers cleanup. The lazy dof faulting will then
* install new helpers which no longer belong to this process!
*/
dtrace_lazy_dofs_destroy(p);
/*
* Clean up any DTrace helpers for the process.
*/
if (p->p_dtrace_helpers != NULL && dtrace_helpers_cleanup) {
(*dtrace_helpers_cleanup)(p);
}
/*
* Cleanup the DTrace provider associated with this process.
*/
proc_lock(p);
if (p->p_dtrace_probes && dtrace_fasttrap_exec_ptr) {
(*dtrace_fasttrap_exec_ptr)(p);
}
proc_unlock(p);
#endif
if (kdebug_enable) {
long dbg_arg1, dbg_arg2, dbg_arg3, dbg_arg4;
/*
* Collect the pathname for tracing
*/
kdbg_trace_string(p, &dbg_arg1, &dbg_arg2, &dbg_arg3, &dbg_arg4);
if (vfexec || spawn) {
KERNEL_DEBUG_CONSTANT1(TRACE_DATA_EXEC | DBG_FUNC_NONE,
p->p_pid ,0,0,0, (uintptr_t)thread_tid(thread));
KERNEL_DEBUG_CONSTANT1(TRACE_STRING_EXEC | DBG_FUNC_NONE,
dbg_arg1, dbg_arg2, dbg_arg3, dbg_arg4, (uintptr_t)thread_tid(thread));
} else {
KERNEL_DEBUG_CONSTANT(TRACE_DATA_EXEC | DBG_FUNC_NONE,
p->p_pid ,0,0,0,0);
KERNEL_DEBUG_CONSTANT(TRACE_STRING_EXEC | DBG_FUNC_NONE,
dbg_arg1, dbg_arg2, dbg_arg3, dbg_arg4, 0);
}
}
/*
* If posix_spawned with the START_SUSPENDED flag, stop the
* process before it runs.
*/
if (imgp->ip_px_sa != NULL) {
psa = (struct _posix_spawnattr *) imgp->ip_px_sa;
if (psa->psa_flags & POSIX_SPAWN_START_SUSPENDED) {
proc_lock(p);
p->p_stat = SSTOP;
proc_unlock(p);
(void) task_suspend_internal(p->task);
}
}
/*
* mark as execed, wakeup the process that vforked (if any) and tell
* it that it now has its own resources back
*/
OSBitOrAtomic(P_EXEC, &p->p_flag);
proc_resetregister(p);
if (p->p_pptr && (p->p_lflag & P_LPPWAIT)) {
proc_lock(p);
p->p_lflag &= ~P_LPPWAIT;
proc_unlock(p);
wakeup((caddr_t)p->p_pptr);
}
/*
* Pay for our earlier safety; deliver the delayed signals from
* the incomplete vfexec process now that it's complete.
*/
if (vfexec && (p->p_lflag & P_LTRACED)) {
psignal_vfork(p, new_task, thread, SIGTRAP);
}
goto done;
badtoolate:
/* Don't allow child process to execute any instructions */
if (!spawn) {
if (vfexec) {
psignal_vfork(p, new_task, thread, SIGKILL);
} else {
psignal(p, SIGKILL);
}
/* We can't stop this system call at this point, so just pretend we succeeded */
error = 0;
}
done:
if (!spawn) {
/* notify only if it has not failed due to FP Key error */
if ((p->p_lflag & P_LTERM_DECRYPTFAIL) == 0)
proc_knote(p, NOTE_EXEC);
}
/* Drop extra references for cases where we don't expect the caller to clean up */
if (vfexec || (spawn && error == 0)) {
task_deallocate(new_task);
thread_deallocate(thread);
}
bad:
return(error);
}
|